Difference between revisions of "Advantech Robotic Suite/ros1 bridge"
Eric.liang (talk | contribs) |
Eric.liang (talk | contribs) |
||
| Line 204: | Line 204: | ||
=== Parametrizing Quality of Service === | === Parametrizing Quality of Service === | ||
It also can define different Quality of Service(QoS) settings per topic, for instructions on how to do this, please refer to [https://github.com/ros2/ros1_bridge#parametrizing-quality-of-service parametrizing-quality-of-service] | It also can define different Quality of Service(QoS) settings per topic, for instructions on how to do this, please refer to [https://github.com/ros2/ros1_bridge#parametrizing-quality-of-service parametrizing-quality-of-service] | ||
| + | |||
| Line 211: | Line 212: | ||
| | ||
| − | <span style="color:#FF0000;"><big> The ROS1 bridge provides a convenient way to achieve data communication between ROS1 and ROS2. However, it is not recommended to use the bridge in high-frequency or large data scenarios. In such cases, it is recommended | + | <span style="color:#FF0000;"><big> The ROS1 bridge provides a convenient way to achieve data communication between ROS1 and ROS2. However, it is not recommended to use the bridge in '''high-frequency''' or '''large data''' scenarios.</big></span> |
| + | |||
| + | <span style="color:#FF0000;"><big>In such cases, it is recommended directly porting your ROS1 node to ROS2 node.</big></span> | ||
Here are some When using the ROS1 bridge, you must consider the following issues. These issues should be taken into account, and optimization and debugging should be carried out according to specific situations to ensure system stability and performance. | Here are some When using the ROS1 bridge, you must consider the following issues. These issues should be taken into account, and optimization and debugging should be carried out according to specific situations to ensure system stability and performance. | ||
Revision as of 04:51, 27 April 2023
Contents
Introduction
To port ROS 1 to ROS 2, the ROS 1 Bridge tool can be used. This tool enables message communication between ROS 1 and ROS 2, allowing nodes from ROS 1 to communicate with nodes from ROS 2 and enabling the use of ROS 1 nodes in ROS 2.
Github: ros1-bridge
Prerequisite
Please make sure that ROS1 and ROS2( ROS2 Suite) have been installed in your environment, for example, ROS1 (Noetic) and ROS2 (Foxy) in Ubuntu 20.04.
Install ros1-bridge
$ sudo apt-get install ros-foxy-ros1-bridge
How To
Supported ROS 2 <=> ROS 1 message and service type
First check if the topic type is supported, you can list all ros1_bridge supported type by using following command.
$ ros2 run ros1_bridge dynamic_bridge --print-pairs
- Supported ROS 2 <=> ROS 1 message type conversion:
- 'actionlib_msgs/msg/GoalID' (ROS 2) <=> 'actionlib_msgs/GoalID' (ROS 1)
- 'actionlib_msgs/msg/GoalStatus' (ROS 2) <=> 'actionlib_msgs/GoalStatus' (ROS 1)
- 'actionlib_msgs/msg/GoalStatusArray' (ROS 2) <=> 'actionlib_msgs/GoalStatusArray' (ROS 1)
- 'builtin_interfaces/msg/Duration' (ROS 2) <=> 'std_msgs/Duration' (ROS 1)
- 'builtin_interfaces/msg/Time' (ROS 2) <=> 'std_msgs/Time' (ROS 1)
- 'diagnostic_msgs/msg/DiagnosticArray' (ROS 2) <=> 'diagnostic_msgs/DiagnosticArray' (ROS 1)
- 'diagnostic_msgs/msg/DiagnosticStatus' (ROS 2) <=> 'diagnostic_msgs/DiagnosticStatus' (ROS 1)
- 'diagnostic_msgs/msg/KeyValue' (ROS 2) <=> 'diagnostic_msgs/KeyValue' (ROS 1)
- 'gazebo_msgs/msg/ContactState' (ROS 2) <=> 'gazebo_msgs/ContactState' (ROS 1)
- 'gazebo_msgs/msg/ContactsState' (ROS 2) <=> 'gazebo_msgs/ContactsState' (ROS 1)
- 'gazebo_msgs/msg/LinkState' (ROS 2) <=> 'gazebo_msgs/LinkState' (ROS 1)
- 'gazebo_msgs/msg/LinkStates' (ROS 2) <=> 'gazebo_msgs/LinkStates' (ROS 1)
- 'gazebo_msgs/msg/ModelState' (ROS 2) <=> 'gazebo_msgs/ModelState' (ROS 1)
- 'gazebo_msgs/msg/ModelStates' (ROS 2) <=> 'gazebo_msgs/ModelStates' (ROS 1)
- 'gazebo_msgs/msg/ODEJointProperties' (ROS 2) <=> 'gazebo_msgs/ODEJointProperties' (ROS 1)
- 'gazebo_msgs/msg/ODEPhysics' (ROS 2) <=> 'gazebo_msgs/ODEPhysics' (ROS 1)
- 'gazebo_msgs/msg/PerformanceMetrics' (ROS 2) <=> 'gazebo_msgs/PerformanceMetrics' (ROS 1)
- 'gazebo_msgs/msg/SensorPerformanceMetric' (ROS 2) <=> 'gazebo_msgs/SensorPerformanceMetric' (ROS 1)
- 'gazebo_msgs/msg/WorldState' (ROS 2) <=> 'gazebo_msgs/WorldState' (ROS 1)
- 'geometry_msgs/msg/Accel' (ROS 2) <=> 'geometry_msgs/Accel' (ROS 1)
- 'geometry_msgs/msg/AccelStamped' (ROS 2) <=> 'geometry_msgs/AccelStamped' (ROS 1)
- 'geometry_msgs/msg/AccelWithCovariance' (ROS 2) <=> 'geometry_msgs/AccelWithCovariance' (ROS 1)
- 'geometry_msgs/msg/AccelWithCovarianceStamped' (ROS 2) <=> 'geometry_msgs/AccelWithCovarianceStamped' (ROS 1)
- 'geometry_msgs/msg/Inertia' (ROS 2) <=> 'geometry_msgs/Inertia' (ROS 1)
- 'geometry_msgs/msg/InertiaStamped' (ROS 2) <=> 'geometry_msgs/InertiaStamped' (ROS 1)
- 'geometry_msgs/msg/Point' (ROS 2) <=> 'geometry_msgs/Point' (ROS 1)
- 'geometry_msgs/msg/Point32' (ROS 2) <=> 'geometry_msgs/Point32' (ROS 1)
- 'geometry_msgs/msg/PointStamped' (ROS 2) <=> 'geometry_msgs/PointStamped' (ROS 1)
- 'geometry_msgs/msg/Polygon' (ROS 2) <=> 'geometry_msgs/Polygon' (ROS 1)
- 'geometry_msgs/msg/PolygonStamped' (ROS 2) <=> 'geometry_msgs/PolygonStamped' (ROS 1)
- 'geometry_msgs/msg/Pose' (ROS 2) <=> 'geometry_msgs/Pose' (ROS 1)
- 'geometry_msgs/msg/Pose2D' (ROS 2) <=> 'geometry_msgs/Pose2D' (ROS 1)
- 'geometry_msgs/msg/PoseArray' (ROS 2) <=> 'geometry_msgs/PoseArray' (ROS 1)
- 'geometry_msgs/msg/PoseStamped' (ROS 2) <=> 'geometry_msgs/PoseStamped' (ROS 1)
- 'geometry_msgs/msg/PoseWithCovariance' (ROS 2) <=> 'geometry_msgs/PoseWithCovariance' (ROS 1)
- 'geometry_msgs/msg/PoseWithCovarianceStamped' (ROS 2) <=> 'geometry_msgs/PoseWithCovarianceStamped' (ROS 1)
- 'geometry_msgs/msg/Quaternion' (ROS 2) <=> 'geometry_msgs/Quaternion' (ROS 1)
- 'geometry_msgs/msg/QuaternionStamped' (ROS 2) <=> 'geometry_msgs/QuaternionStamped' (ROS 1)
- 'geometry_msgs/msg/Transform' (ROS 2) <=> 'geometry_msgs/Transform' (ROS 1)
- 'geometry_msgs/msg/TransformStamped' (ROS 2) <=> 'geometry_msgs/TransformStamped' (ROS 1)
- 'geometry_msgs/msg/Twist' (ROS 2) <=> 'geometry_msgs/Twist' (ROS 1)
- 'geometry_msgs/msg/TwistStamped' (ROS 2) <=> 'geometry_msgs/TwistStamped' (ROS 1)
- 'geometry_msgs/msg/TwistWithCovariance' (ROS 2) <=> 'geometry_msgs/TwistWithCovariance' (ROS 1)
- 'geometry_msgs/msg/TwistWithCovarianceStamped' (ROS 2) <=> 'geometry_msgs/TwistWithCovarianceStamped' (ROS 1)
- 'geometry_msgs/msg/Vector3' (ROS 2) <=> 'geometry_msgs/Vector3' (ROS 1)
- 'geometry_msgs/msg/Vector3Stamped' (ROS 2) <=> 'geometry_msgs/Vector3Stamped' (ROS 1)
- 'geometry_msgs/msg/Wrench' (ROS 2) <=> 'geometry_msgs/Wrench' (ROS 1)
- 'geometry_msgs/msg/WrenchStamped' (ROS 2) <=> 'geometry_msgs/WrenchStamped' (ROS 1)
- 'nav_msgs/msg/GridCells' (ROS 2) <=> 'nav_msgs/GridCells' (ROS 1)
- 'nav_msgs/msg/MapMetaData' (ROS 2) <=> 'nav_msgs/MapMetaData' (ROS 1)
- 'nav_msgs/msg/OccupancyGrid' (ROS 2) <=> 'nav_msgs/OccupancyGrid' (ROS 1)
- 'nav_msgs/msg/Odometry' (ROS 2) <=> 'nav_msgs/Odometry' (ROS 1)
- 'nav_msgs/msg/Path' (ROS 2) <=> 'nav_msgs/Path' (ROS 1)
- 'rcl_interfaces/msg/Log' (ROS 2) <=> 'rosgraph_msgs/Log' (ROS 1)
- 'rosgraph_msgs/msg/Clock' (ROS 2) <=> 'rosgraph_msgs/Clock' (ROS 1)
- 'sensor_msgs/msg/BatteryState' (ROS 2) <=> 'sensor_msgs/BatteryState' (ROS 1)
- 'sensor_msgs/msg/CameraInfo' (ROS 2) <=> 'sensor_msgs/CameraInfo' (ROS 1)
- 'sensor_msgs/msg/ChannelFloat32' (ROS 2) <=> 'sensor_msgs/ChannelFloat32' (ROS 1)
- 'sensor_msgs/msg/CompressedImage' (ROS 2) <=> 'sensor_msgs/CompressedImage' (ROS 1)
- 'sensor_msgs/msg/FluidPressure' (ROS 2) <=> 'sensor_msgs/FluidPressure' (ROS 1)
- 'sensor_msgs/msg/Illuminance' (ROS 2) <=> 'sensor_msgs/Illuminance' (ROS 1)
- 'sensor_msgs/msg/Image' (ROS 2) <=> 'sensor_msgs/Image' (ROS 1)
- 'sensor_msgs/msg/Imu' (ROS 2) <=> 'sensor_msgs/Imu' (ROS 1)
- 'sensor_msgs/msg/JointState' (ROS 2) <=> 'sensor_msgs/JointState' (ROS 1)
- 'sensor_msgs/msg/Joy' (ROS 2) <=> 'sensor_msgs/Joy' (ROS 1)
- 'sensor_msgs/msg/JoyFeedback' (ROS 2) <=> 'sensor_msgs/JoyFeedback' (ROS 1)
- 'sensor_msgs/msg/JoyFeedbackArray' (ROS 2) <=> 'sensor_msgs/JoyFeedbackArray' (ROS 1)
- 'sensor_msgs/msg/LaserEcho' (ROS 2) <=> 'sensor_msgs/LaserEcho' (ROS 1)
- 'sensor_msgs/msg/LaserScan' (ROS 2) <=> 'sensor_msgs/LaserScan' (ROS 1)
- 'sensor_msgs/msg/MagneticField' (ROS 2) <=> 'sensor_msgs/MagneticField' (ROS 1)
- 'sensor_msgs/msg/MultiDOFJointState' (ROS 2) <=> 'sensor_msgs/MultiDOFJointState' (ROS 1)
- 'sensor_msgs/msg/MultiEchoLaserScan' (ROS 2) <=> 'sensor_msgs/MultiEchoLaserScan' (ROS 1)
- 'sensor_msgs/msg/NavSatFix' (ROS 2) <=> 'sensor_msgs/NavSatFix' (ROS 1)
- 'sensor_msgs/msg/NavSatStatus' (ROS 2) <=> 'sensor_msgs/NavSatStatus' (ROS 1)
- 'sensor_msgs/msg/PointCloud' (ROS 2) <=> 'sensor_msgs/PointCloud' (ROS 1)
- 'sensor_msgs/msg/PointCloud2' (ROS 2) <=> 'sensor_msgs/PointCloud2' (ROS 1)
- 'sensor_msgs/msg/PointField' (ROS 2) <=> 'sensor_msgs/PointField' (ROS 1)
- 'sensor_msgs/msg/Range' (ROS 2) <=> 'sensor_msgs/Range' (ROS 1)
- 'sensor_msgs/msg/RegionOfInterest' (ROS 2) <=> 'sensor_msgs/RegionOfInterest' (ROS 1)
- 'sensor_msgs/msg/RelativeHumidity' (ROS 2) <=> 'sensor_msgs/RelativeHumidity' (ROS 1)
- 'sensor_msgs/msg/Temperature' (ROS 2) <=> 'sensor_msgs/Temperature' (ROS 1)
- 'sensor_msgs/msg/TimeReference' (ROS 2) <=> 'sensor_msgs/TimeReference' (ROS 1)
- 'shape_msgs/msg/Mesh' (ROS 2) <=> 'shape_msgs/Mesh' (ROS 1)
- 'shape_msgs/msg/MeshTriangle' (ROS 2) <=> 'shape_msgs/MeshTriangle' (ROS 1)
- 'shape_msgs/msg/Plane' (ROS 2) <=> 'shape_msgs/Plane' (ROS 1)
- 'shape_msgs/msg/SolidPrimitive' (ROS 2) <=> 'shape_msgs/SolidPrimitive' (ROS 1)
- 'std_msgs/msg/Bool' (ROS 2) <=> 'std_msgs/Bool' (ROS 1)
- 'std_msgs/msg/Byte' (ROS 2) <=> 'std_msgs/Byte' (ROS 1)
- 'std_msgs/msg/ByteMultiArray' (ROS 2) <=> 'std_msgs/ByteMultiArray' (ROS 1)
- 'std_msgs/msg/Char' (ROS 2) <=> 'std_msgs/Char' (ROS 1)
- 'std_msgs/msg/ColorRGBA' (ROS 2) <=> 'std_msgs/ColorRGBA' (ROS 1)
- 'std_msgs/msg/Empty' (ROS 2) <=> 'std_msgs/Empty' (ROS 1)
- 'std_msgs/msg/Float32' (ROS 2) <=> 'std_msgs/Float32' (ROS 1)
- 'std_msgs/msg/Float32MultiArray' (ROS 2) <=> 'std_msgs/Float32MultiArray' (ROS 1)
- 'std_msgs/msg/Float64' (ROS 2) <=> 'std_msgs/Float64' (ROS 1)
- 'std_msgs/msg/Float64MultiArray' (ROS 2) <=> 'std_msgs/Float64MultiArray' (ROS 1)
- 'std_msgs/msg/Header' (ROS 2) <=> 'std_msgs/Header' (ROS 1)
- 'std_msgs/msg/Int16' (ROS 2) <=> 'std_msgs/Int16' (ROS 1)
- 'std_msgs/msg/Int16MultiArray' (ROS 2) <=> 'std_msgs/Int16MultiArray' (ROS 1)
- 'std_msgs/msg/Int32' (ROS 2) <=> 'std_msgs/Int32' (ROS 1)
- 'std_msgs/msg/Int32MultiArray' (ROS 2) <=> 'std_msgs/Int32MultiArray' (ROS 1)
- 'std_msgs/msg/Int64' (ROS 2) <=> 'std_msgs/Int64' (ROS 1)
- 'std_msgs/msg/Int64MultiArray' (ROS 2) <=> 'std_msgs/Int64MultiArray' (ROS 1)
- 'std_msgs/msg/Int8' (ROS 2) <=> 'std_msgs/Int8' (ROS 1)
- 'std_msgs/msg/Int8MultiArray' (ROS 2) <=> 'std_msgs/Int8MultiArray' (ROS 1)
- 'std_msgs/msg/MultiArrayDimension' (ROS 2) <=> 'std_msgs/MultiArrayDimension' (ROS 1)
- 'std_msgs/msg/MultiArrayLayout' (ROS 2) <=> 'std_msgs/MultiArrayLayout' (ROS 1)
- 'std_msgs/msg/String' (ROS 2) <=> 'std_msgs/String' (ROS 1)
- 'std_msgs/msg/UInt16' (ROS 2) <=> 'std_msgs/UInt16' (ROS 1)
- 'std_msgs/msg/UInt16MultiArray' (ROS 2) <=> 'std_msgs/UInt16MultiArray' (ROS 1)
- 'std_msgs/msg/UInt32' (ROS 2) <=> 'std_msgs/UInt32' (ROS 1)
- 'std_msgs/msg/UInt32MultiArray' (ROS 2) <=> 'std_msgs/UInt32MultiArray' (ROS 1)
- 'std_msgs/msg/UInt64' (ROS 2) <=> 'std_msgs/UInt64' (ROS 1)
- 'std_msgs/msg/UInt64MultiArray' (ROS 2) <=> 'std_msgs/UInt64MultiArray' (ROS 1)
- 'std_msgs/msg/UInt8' (ROS 2) <=> 'std_msgs/UInt8' (ROS 1)
- 'std_msgs/msg/UInt8MultiArray' (ROS 2) <=> 'std_msgs/UInt8MultiArray' (ROS 1)
- 'stereo_msgs/msg/DisparityImage' (ROS 2) <=> 'stereo_msgs/DisparityImage' (ROS 1)
- 'tf2_msgs/msg/TF2Error' (ROS 2) <=> 'tf2_msgs/TF2Error' (ROS 1)
- 'tf2_msgs/msg/TFMessage' (ROS 2) <=> 'tf2_msgs/TFMessage' (ROS 1)
- 'tf2_msgs/msg/TFMessage' (ROS 2) <=> 'tf/tfMessage' (ROS 1)
- 'trajectory_msgs/msg/JointTrajectory' (ROS 2) <=> 'trajectory_msgs/JointTrajectory' (ROS 1)
- 'trajectory_msgs/msg/JointTrajectoryPoint' (ROS 2) <=> 'trajectory_msgs/JointTrajectoryPoint' (ROS 1)
- 'trajectory_msgs/msg/MultiDOFJointTrajectory' (ROS 2) <=> 'trajectory_msgs/MultiDOFJointTrajectory' (ROS 1)
- 'trajectory_msgs/msg/MultiDOFJointTrajectoryPoint' (ROS 2) <=> 'trajectory_msgs/MultiDOFJointTrajectoryPoint' (ROS 1)
- 'visualization_msgs/msg/ImageMarker' (ROS 2) <=> 'visualization_msgs/ImageMarker' (ROS 1)
- 'visualization_msgs/msg/InteractiveMarker' (ROS 2) <=> 'visualization_msgs/InteractiveMarker' (ROS 1)
- 'visualization_msgs/msg/InteractiveMarkerControl' (ROS 2) <=> 'visualization_msgs/InteractiveMarkerControl' (ROS 1)
- 'visualization_msgs/msg/InteractiveMarkerFeedback' (ROS 2) <=> 'visualization_msgs/InteractiveMarkerFeedback' (ROS 1)
- 'visualization_msgs/msg/InteractiveMarkerInit' (ROS 2) <=> 'visualization_msgs/InteractiveMarkerInit' (ROS 1)
- 'visualization_msgs/msg/InteractiveMarkerPose' (ROS 2) <=> 'visualization_msgs/InteractiveMarkerPose' (ROS 1)
- 'visualization_msgs/msg/InteractiveMarkerUpdate' (ROS 2) <=> 'visualization_msgs/InteractiveMarkerUpdate' (ROS 1)
- 'visualization_msgs/msg/Marker' (ROS 2) <=> 'visualization_msgs/Marker' (ROS 1)
- 'visualization_msgs/msg/MarkerArray' (ROS 2) <=> 'visualization_msgs/MarkerArray' (ROS 1)
- 'visualization_msgs/msg/MenuEntry' (ROS 2) <=> 'visualization_msgs/MenuEntry' (ROS 1)
- Supported ROS 2 <=> ROS 1 service type conversion:
- 'diagnostic_msgs/srv/AddDiagnostics' (ROS 2) <=> 'diagnostic_msgs/AddDiagnostics' (ROS 1)
- 'diagnostic_msgs/srv/SelfTest' (ROS 2) <=> 'diagnostic_msgs/SelfTest' (ROS 1)
- 'example_interfaces/srv/AddTwoInts' (ROS 2) <=> 'roscpp_tutorials/TwoInts' (ROS 1)
- 'example_interfaces/srv/AddTwoInts' (ROS 2) <=> 'rospy_tutorials/AddTwoInts' (ROS 1)
- 'gazebo_msgs/srv/BodyRequest' (ROS 2) <=> 'gazebo_msgs/BodyRequest' (ROS 1)
- 'gazebo_msgs/srv/DeleteLight' (ROS 2) <=> 'gazebo_msgs/DeleteLight' (ROS 1)
- 'gazebo_msgs/srv/DeleteModel' (ROS 2) <=> 'gazebo_msgs/DeleteModel' (ROS 1)
- 'gazebo_msgs/srv/GetJointProperties' (ROS 2) <=> 'gazebo_msgs/GetJointProperties' (ROS 1)
- 'gazebo_msgs/srv/GetLightProperties' (ROS 2) <=> 'gazebo_msgs/GetLightProperties' (ROS 1)
- 'gazebo_msgs/srv/GetLinkProperties' (ROS 2) <=> 'gazebo_msgs/GetLinkProperties' (ROS 1)
- 'gazebo_msgs/srv/GetLinkState' (ROS 2) <=> 'gazebo_msgs/GetLinkState' (ROS 1)
- 'gazebo_msgs/srv/GetModelProperties' (ROS 2) <=> 'gazebo_msgs/GetModelProperties' (ROS 1)
- 'gazebo_msgs/srv/GetModelState' (ROS 2) <=> 'gazebo_msgs/GetModelState' (ROS 1)
- 'gazebo_msgs/srv/GetPhysicsProperties' (ROS 2) <=> 'gazebo_msgs/GetPhysicsProperties' (ROS 1)
- 'gazebo_msgs/srv/GetWorldProperties' (ROS 2) <=> 'gazebo_msgs/GetWorldProperties' (ROS 1)
- 'gazebo_msgs/srv/JointRequest' (ROS 2) <=> 'gazebo_msgs/JointRequest' (ROS 1)
- 'gazebo_msgs/srv/SetJointProperties' (ROS 2) <=> 'gazebo_msgs/SetJointProperties' (ROS 1)
- 'gazebo_msgs/srv/SetJointTrajectory' (ROS 2) <=> 'gazebo_msgs/SetJointTrajectory' (ROS 1)
- 'gazebo_msgs/srv/SetLinkProperties' (ROS 2) <=> 'gazebo_msgs/SetLinkProperties' (ROS 1)
- 'gazebo_msgs/srv/SetLinkState' (ROS 2) <=> 'gazebo_msgs/SetLinkState' (ROS 1)
- 'gazebo_msgs/srv/SetModelConfiguration' (ROS 2) <=> 'gazebo_msgs/SetModelConfiguration' (ROS 1)
- 'gazebo_msgs/srv/SetModelState' (ROS 2) <=> 'gazebo_msgs/SetModelState' (ROS 1)
- 'gazebo_msgs/srv/SetPhysicsProperties' (ROS 2) <=> 'gazebo_msgs/SetPhysicsProperties' (ROS 1)
- 'gazebo_msgs/srv/SpawnModel' (ROS 2) <=> 'gazebo_msgs/SpawnModel' (ROS 1)
- 'nav_msgs/srv/GetMap' (ROS 2) <=> 'nav_msgs/GetMap' (ROS 1)
- 'nav_msgs/srv/GetPlan' (ROS 2) <=> 'nav_msgs/GetPlan' (ROS 1)
- 'nav_msgs/srv/SetMap' (ROS 2) <=> 'nav_msgs/SetMap' (ROS 1)
- 'sensor_msgs/srv/SetCameraInfo' (ROS 2) <=> 'sensor_msgs/SetCameraInfo' (ROS 1)
- 'std_srvs/srv/Empty' (ROS 2) <=> 'std_srvs/Empty' (ROS 1)
- 'std_srvs/srv/SetBool' (ROS 2) <=> 'std_srvs/SetBool' (ROS 1)
- 'std_srvs/srv/Trigger' (ROS 2) <=> 'std_srvs/Trigger' (ROS 1)
- 'tf2_msgs/srv/FrameGraph' (ROS 2) <=> 'tf2_msgs/FrameGraph' (ROS 1)
Dynamic_bridge
The dynamic_bridge will watch the available ROS 1 and ROS 2 topics, once a matching topic has been detected it starts to bridge the messages on this topic.
- Bidirectional bridge between ROS1 and ROS2
$ ros2 run ros1_bridge dynamic_bridge --bridge-all-topics
- ROS1 to ROS2 bridge
$ ros2 run ros1_bridge dynamic_bridge --bridge-all-1to2-topics
- ROS2 to ROS1 bridge
$ ros2 run ros1_bridge dynamic_bridge --bridge-all-2to1-topics
Parameter_bridge
The parameter_bridge can bridge only selected topics and services by using a YAML file.
For example, only bridge a topic called /chatter

How to use parameter_bridge can refer to parameter_bridge
Parametrizing Quality of Service
It also can define different Quality of Service(QoS) settings per topic, for instructions on how to do this, please refer to parametrizing-quality-of-service
Notice
The ROS1 bridge provides a convenient way to achieve data communication between ROS1 and ROS2. However, it is not recommended to use the bridge in high-frequency or large data scenarios.
In such cases, it is recommended directly porting your ROS1 node to ROS2 node.
Here are some When using the ROS1 bridge, you must consider the following issues. These issues should be taken into account, and optimization and debugging should be carried out according to specific situations to ensure system stability and performance.
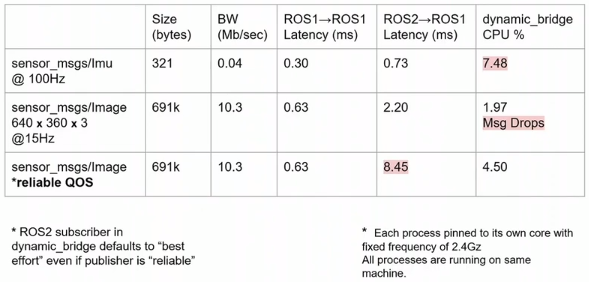
- Latency & CPU Usage: Since the message formats of ROS 1 and ROS 2 are different, the ROS 1 Bridge will perform message format conversion, which can result in latency and CPU usage.
- Data Lost: It may drops message due to the message transmission required by the ROS 1 Bridge.
Here are some example for your reference.
- Some users have also mentioned in Github Issues that there are latency issues when using TF or large datasets (such as pointcloud and image).
- Latency and CPU usage: ROSCon'22 - Migrating from ROS1 to ROS2(4:28)
- During the ROSCon'22 speech, it was mentioned that using ros1-bridge can cause issues such as high latency and CPU usage. The following chart compares the differences between using and not using ros1-bridge, which clearly shows the difference. For detail please visit the website to watch the speech.